Andrew,
KC2G, создал сайт, на котором размещены
карты, позволяющие оценить прохождение практически в реальном времени. Для тех,
кому это интересно, постарался перевести информацию из раздела About.
Если очень коротко:
MUF - самая высокая частота, которая, как ожидается, может
отразиться от ионосферы под углом скольжения на пути длиной 3000 км. Показывает
возможность проведения DX
связей на этой частоте и ниже, в пределах окрашенной области.
foF2 - самая высокая
частота для ближнего прохождения. Частоты ниже foF2 могут отражаться от
ионосферы и падать вертикально вниз, т.е. могут быть использованы для проведения ближних
связей.
Ну и, как обычно, «серая линия», где могут твориться разные
чудеса.
Своё положение на карте можно найти по координатам, цифры на
цветовой шкале под картой соответствуют любительским диапазонам, время указано
в UTC.
= = =
Что это такое?
prop.kc2g.com предоставляет карты наличия прохождения почти
в реальном времени и данные об ионосферных условиях для использования
операторами-любителями.
Откуда поступают
данные?
Данные об ионосфере, близкие к реальному времени, которые
обеспечивают работу сайта, собираются с помощью ионосферных радаров,
разбросанных по всему миру и собираются в Lowell Global Ionospheric Radio
Observatory (GIRO). GIRO предоставляет мне доступ к их данным для создания этих
карт, за что мы очень благодарны.
Физическая модель ионосферы для графиков "IRI" - это Международная эталонная ионосфера 2016
года (International Reference Ionosphere 2016) , созданная совместной целевой
группой Комитета по космическим исследованиям (Committee on Space Research
(COSPAR) и Международного союза радиологических наук (International Union of
Radio Science (URSI).
Кто еще приложил руку?
Сборщик данных GIRO и картографирование контуров были
изначально написаны Matthew Smith, AF7TI, и размещены на сайте af7ti.com. Позже
они были удалены с этого сайта, а код был размещен на GitHub. В январе 2019
года Andrew, KC2G,начал дорабатывать код на GitHub, вносить некоторые улучшения
в алгоритм интерполяции и разместил результаты на этом сайте. Код написан на
языке Python, с использованием NumPy, SciPy, Pandas, Cartopy и множество других
вещей.
Как часто обновляются
данные?
Новая карта генерируется каждые 15 минут (в 10, 25, 40 и 55
минут каждого часа) из данных, которые обычно имеют возраст от 5 до 20 минут.
Поэтому в среднем вы смотрите на состояние ионосферы около получаса назад.
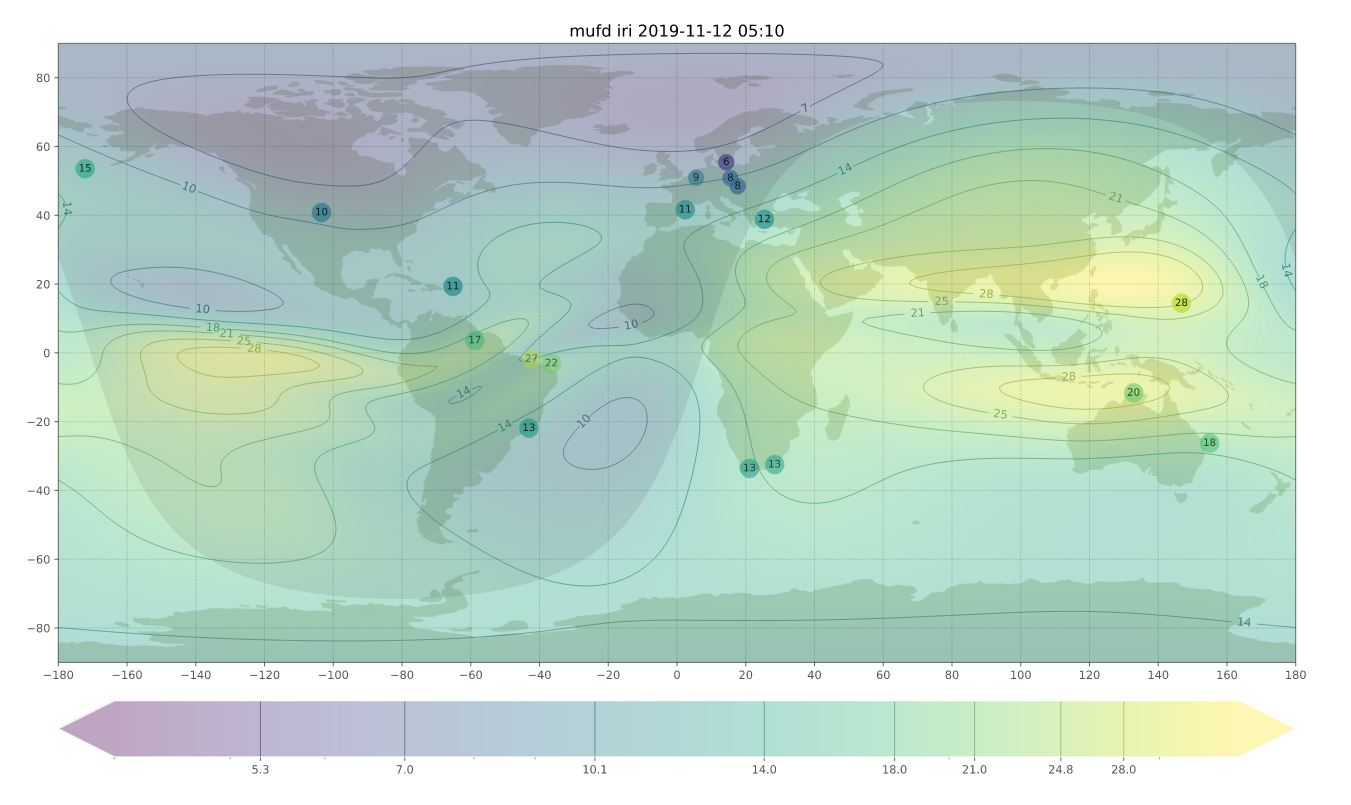
Как это прочитать?
Карта MUF показывает максимальную полезную частоту,
используя цвета и контурные линии. Например, если заданная область на карте
зеленоватая и лежит между контурами, помеченными как «15» и «17», то MUF
составляет около 16 МГц в этом месте. Показания с каждой отдельной станции
отображаются в виде цветных точек с цифрами внутри, чтобы вы могли видеть,
откуда поступает информация. Если точка исчезает с карты, то у этой станции
низкий показатель достоверности.
MUF - самая высокая частота, которая, как ожидается, отразится
от ионосферы на пути длиной 3000 км. Таким образом, MUF вдоль пути между двумя
точками показывает возможность DX длинного скачка между этими точками в данной
полосе. Если MUF указана 12 МГц, то диапазоны 30 метров и больше будут
работать, но 20 метров и короче будут закрыты. Для длинных многопереходных трасс
важнее всего наихудшее значение MUF на пути. Для однопроходных трасс длиной
менее 3000 км полезная частота будет меньше, чем MUF, потому что сигналы с более
высоким углом легче пробивают ионосферу. По мере приближения к вертикали
полезная частота падает до критической частоты (foF2).
Страница foF2 показывает карту, аналогичную карте MUF, за
исключением того, что она отображает критическую частоту (foF2). Это просто:
это самая высокая частота, которую вы можете использовать для NVIS (для
ближнего прохождения). Когда foF2 поднимается до 7 МГц и выше, то 40 метров
«становятся короткими» и могут использоваться для местных связей; если она
опускается ниже 3 МГц, то и на 80 метрах местные станции исчезают, но удаленные
станции все еще могут быть слышны.
Наконец, обе карты показывают, какие части Земли находятся
при дневном свете, а какие - ночью. Обратите особое внимание на линию,
разделяющую день и ночь (терминатор, или, как его называют НАМы, «серая
линия»). Уникальные возможности прохождения часто возникают, когда одна или обе
станции находятся почти под этой линией.
Больше информации об ионосферном прохождении можно найти в различных
источниках о любительском радио.
Почему карта
показывает что-то сумасшедшее/неправильное?
Несмотря на все усилия исследователей, в мире существует не очень
много ионосферных радаров, проводящих измерения. Большинство из них сконцентрированы
в нескольких областях мира, а во многих других областях их попросту нет. Из-за
этого карта, которую вы видите, является интерполяцией. То есть мой код делает
все возможное, чтобы взять за основу MUF (или FoF2) в этих разбросанных точках
земного шара и выяснить, как это может выглядеть в любом другом месте. Я делаю
все возможное, чтобы настроить алгоритм, чтобы он хорошо работал, но придумать
алгоритм, который может экстраполировать данные несколько точек, не получая
время от времени необоснованных значений, является сложной проблемой. Процесс прогнозирования
получается довольно хорошим в областях, находящимся
ближе к измерительным станциям, но неопределенность намного выше в областях,
которые находятся далеко от точек измерений. Только цифры внутри цветных точек,
разбросанных по карте, представляют фактические измеренные данные.
Иногда сами станции предоставляют данные, которые являются
неточными или не согласуются друг с другом. На самом деле сложно сказать, кто
прав, а кто нет, поэтому на карте будут иногда показаны забавные результаты, если
принимать во внимание все измерения.
Иногда станция отключается и перестает предоставлять данные,
а иногда станция, которая была отключена, снова появляется. Сложение или
вычитание одной точки данных может привести к некоторым неожиданным изменениям
в ее общей картине.
Что такое алгоритм на
основе IRI?
∙ Во-первых, модель IRI запускается с
учетом текущей даты и времени и долгосрочного солнечного прогноза. Это
«климатическая» модель, создающая карту средних условий для данного сезона,
времени суток и положения в солнечном цикле.
∙ Затем модель IRI подгоняется к данным ионосферных
радаров с использованием одного параметра масштабирования и регрессии
наименьших квадратов с доверительной вероятностью. Это объясняет любую разницу
между фактическим солнечным потоком и прогнозируемой тенденцией (увеличение или
уменьшение солнечного потока приводит к тому, что значения MUF и FoF2
увеличиваются или уменьшаются в значительной степени линейно).
∙ Журналы соотношений между
масштабированной моделью IRI и измеренными данными подгоняются с использованием
регрессии Гауссова процесса в трехмерном пространстве. Это даёт множитель,
который плавно изменяется по всему земному шару, с целью приблизить
предсказанные IRI значения к измеренным радарами значениям.
∙ Модель IRI и модель GP объединяются и привязываются
к сетке точек на сфере (каждый градус широты и долготы) и используются для
построения контурного графика. Сюда же добавляется в несколько цветов карта
суши и мирового океан, и на этом всё.
Что такое не-IRI
(устаревший) алгоритм интерполяции?
∙ Во-первых, данные (MUF (D) или FoF2) преобразуются путем взятия
их логарифма, в конце всех преобразований производится обратное инвертирование («работа
в лог-пространстве»).
∙ Затем модель сферических гармоник
третьего порядка подгоняется к данным с использованием регрессии наименьших
квадратов с доверительной вероятностью. Все слагаемые, кроме одного 0-го
порядка, умножаются на коэффициент s sph < 1.
∙ Остаточная погрешность между моделью
сферических гармоник и измеренными данными устанавливается с использованием
регрессии гауссовского процесса (GP), как и в модели IRI. Значения умножаются на коэффициент srbf < 1.
∙ Сферически-гармоническая модель и
модель GP объединяются,
дискретизируются и изображаются в контурном виде.
Такой подход дает однородные результаты, которые отражают
общую разницу между дневной и ночной сторонами, севером и югом, а также
экватором и полюсами. Тем не менее, он не может улавливать мелкие детали и
иногда дает прогнозы, которые находятся далеко за пределами диапазона входных
данных. Соответствие RBF с реальностью лучше при создании модели прохождения между двумя отдельными точками получения
данных, и с гораздо меньшей вероятностью дает значения вне диапазона, но
гораздо меньше понимает глобальную однородность или достоверность. Объединение
этих двух моделей дает достойный результат, а коэффициенты масштабирования ssph
и srbf определяют, насколько каждая
модель вносит свой вклад в конечный результат. На момент написания статьи параметры
были ssph
= 0,8 и srbf = 0,9, что означает, что
сферическая гармоническая подгонка включена в выходной сигнал в объёме 80%;
остальная часть отклонений от глобального среднего значения оставлена для
соответствия модели RBF; и 90% этой разницы включены в результат.
Если хотите
что-нибудь сказать!
Пожалуйста, отправьте отзыв на kc2g@cleverdomain.org.
Комментариев нет:
Отправить комментарий
Извините, в связи с огромным количеством спама, все ваши комментарии могут появляться с небольшой задержкой.
Буду рад, если вы не забудете подписаться под своим комментарием :)